Timeline
Fall 2024
Team
Sadie Martin, Yixiao Zhang, Jared Teiger
Tools
Figma, Arduino, Excel, Videography
Awards
2025 HRI Student Design Competition
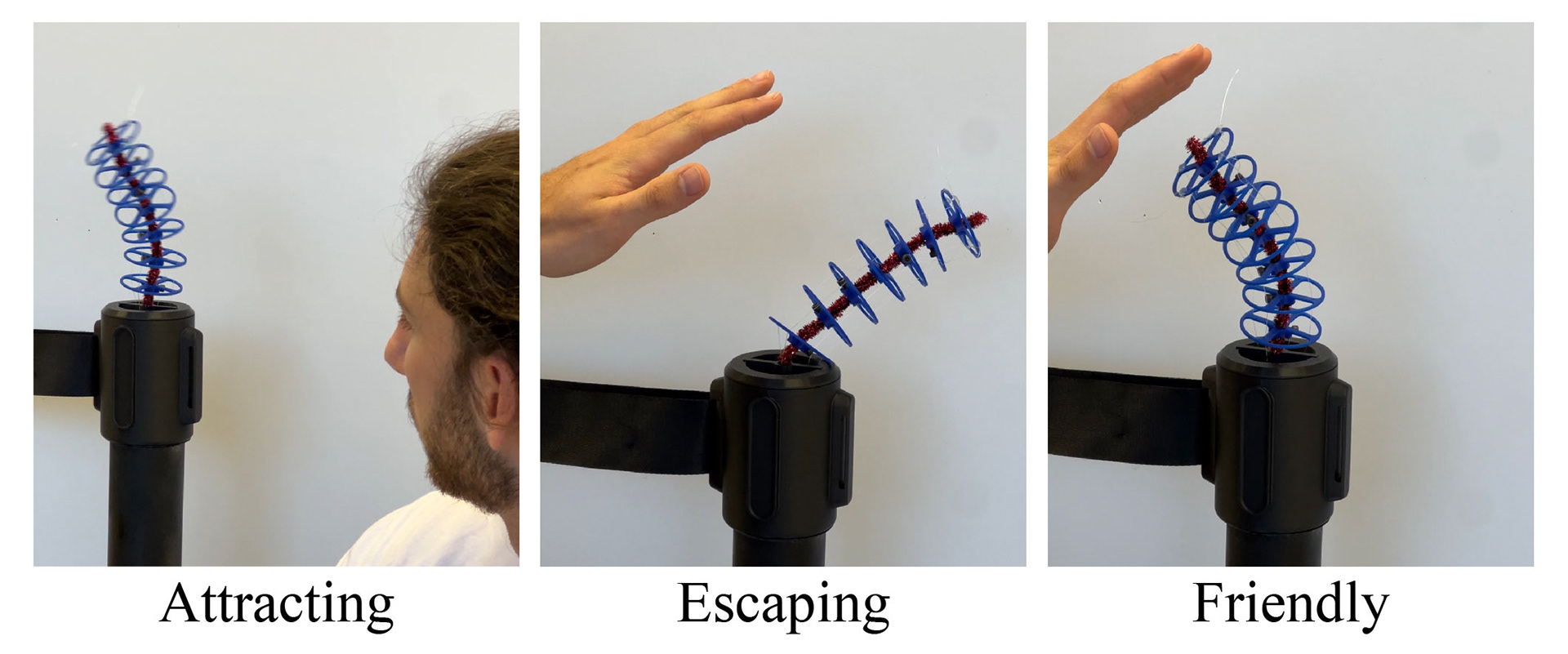
"Social Queue" is a robotic stanchion with a responsive tentacle designed to make waiting in line more engaging through playful human-robot interactions in three modes: "Attracting," "Escaping," and "Friendly." Field-based, in-between experiments show it enhances enjoyment, though its effect on perceived waiting time remains inconclusive.
Read the full research article here
Identifying the Problem
Waiting in line is an essential part of contemporary life and people spend time in line for various scenarios, from restaurants to airports. However, it is noticeable that people have limited things to do while waiting in line. Boredom and lack of social interaction are the problems we would like to address through this research project, and the focus on positive social connections and mental health is closely related to the UNSDG #3 “Good Health and Well-Being”.

Design & Interaction
Low-Fidelity Prototypes
In the initial stages, we developed two concepts into low-fidelity prototypes: the Spinning Pole and the Bending Pole. Through testing, the Bending Pole concept proved best suited for this research project. This prototype featured a manually controlled tentacle that responded to users' hands when they reached out.

High-Fidelity Prototypes
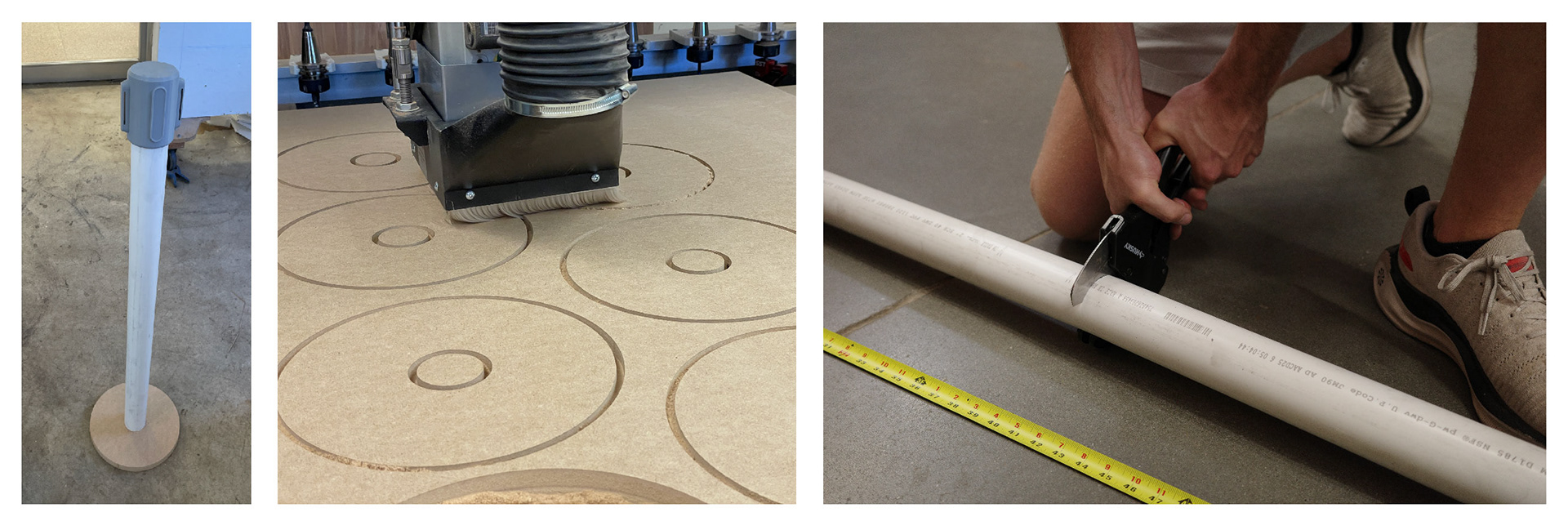
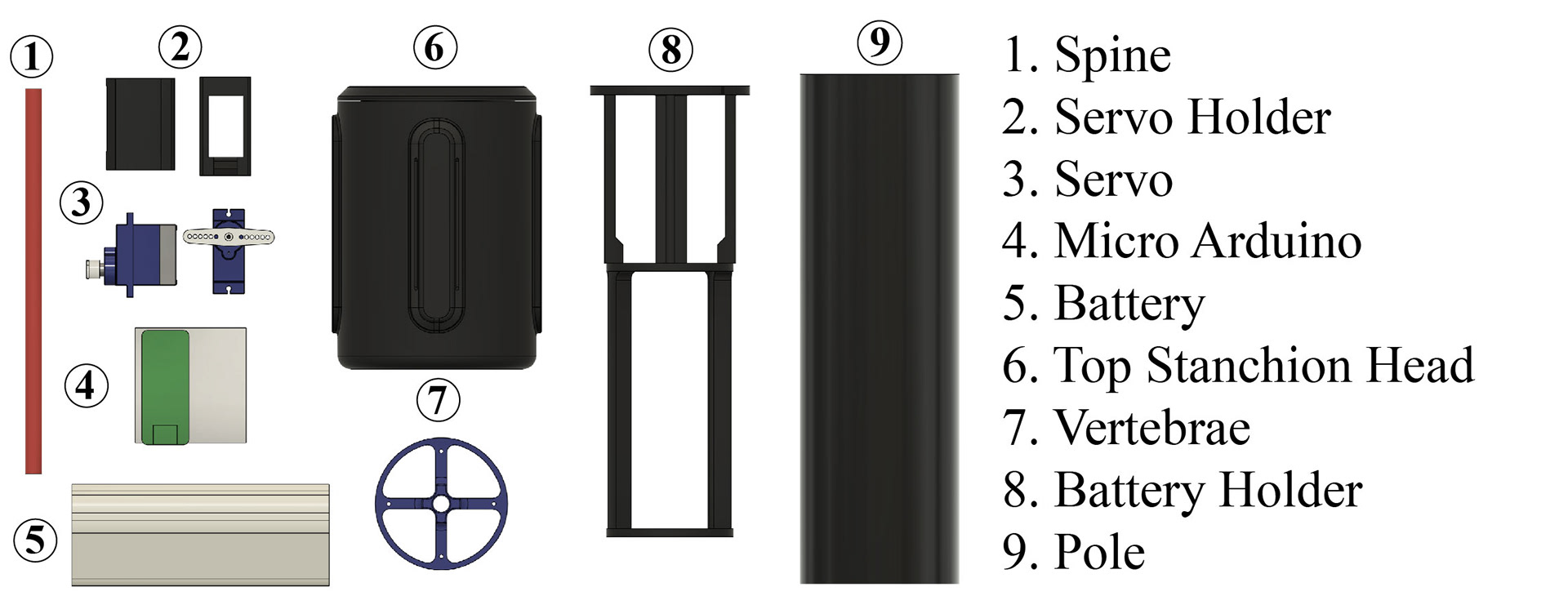
Stanchion Poles: We built custom stanchion poles due to the unavailability of commercial options that met our specifications. The pole base was cut from PVC pipes and mounted on circular medium-density fiberboard (MDF), while the top stanchion head was customized through 3D printing due to the need for precise spatial integration.
Tentacle Structure: The tentacle structure was designed as a cohesive extension from the top of the pole, while also providing sufficient flexibility for swinging around. We replaced the cardboard vertebrae with 3D-printed parts to enhance the structural robustness. The vertebrae were connected by a flexible spine made of pipe cleaners (containing twisted steel wire), allowing for four axes of movement. One servo controlled the front and back motion, while the other controlled side-to-side motion.
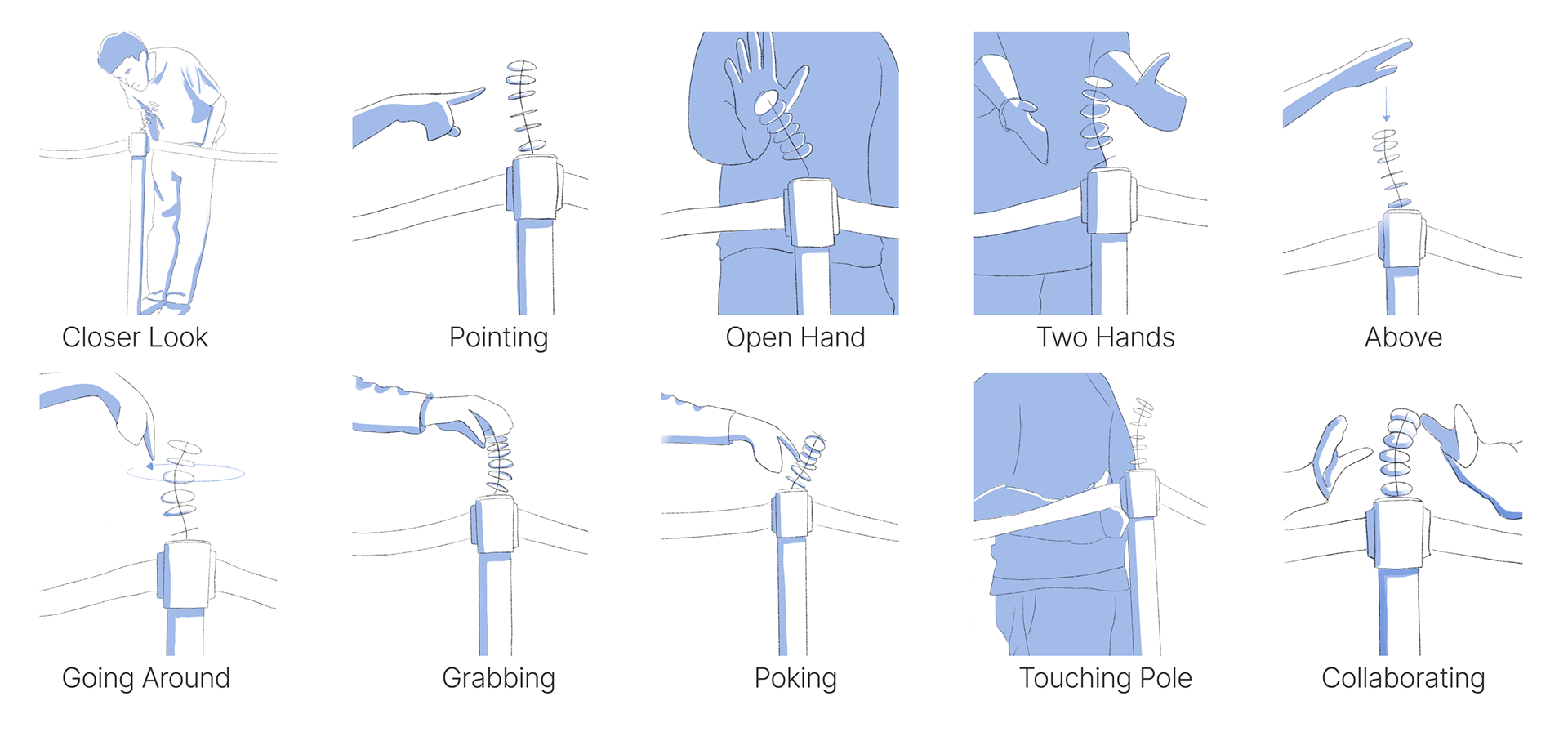
Modes of Interaction: Acknowledging that a robot’s posture can convey emotion and influence the emotions of onlookers, we designed three modes of interaction for "Social Queue.'' The "Attracting" mode was designed to make sudden movements to draw attention. "Friendly" and "Escaping'' were two contrasting interaction modes, where the former gently leaned toward users' hands and the latter swiftly moved away. These distinct behaviors were designed to convey personalities that encourage more playful interactions.
Validation Testing
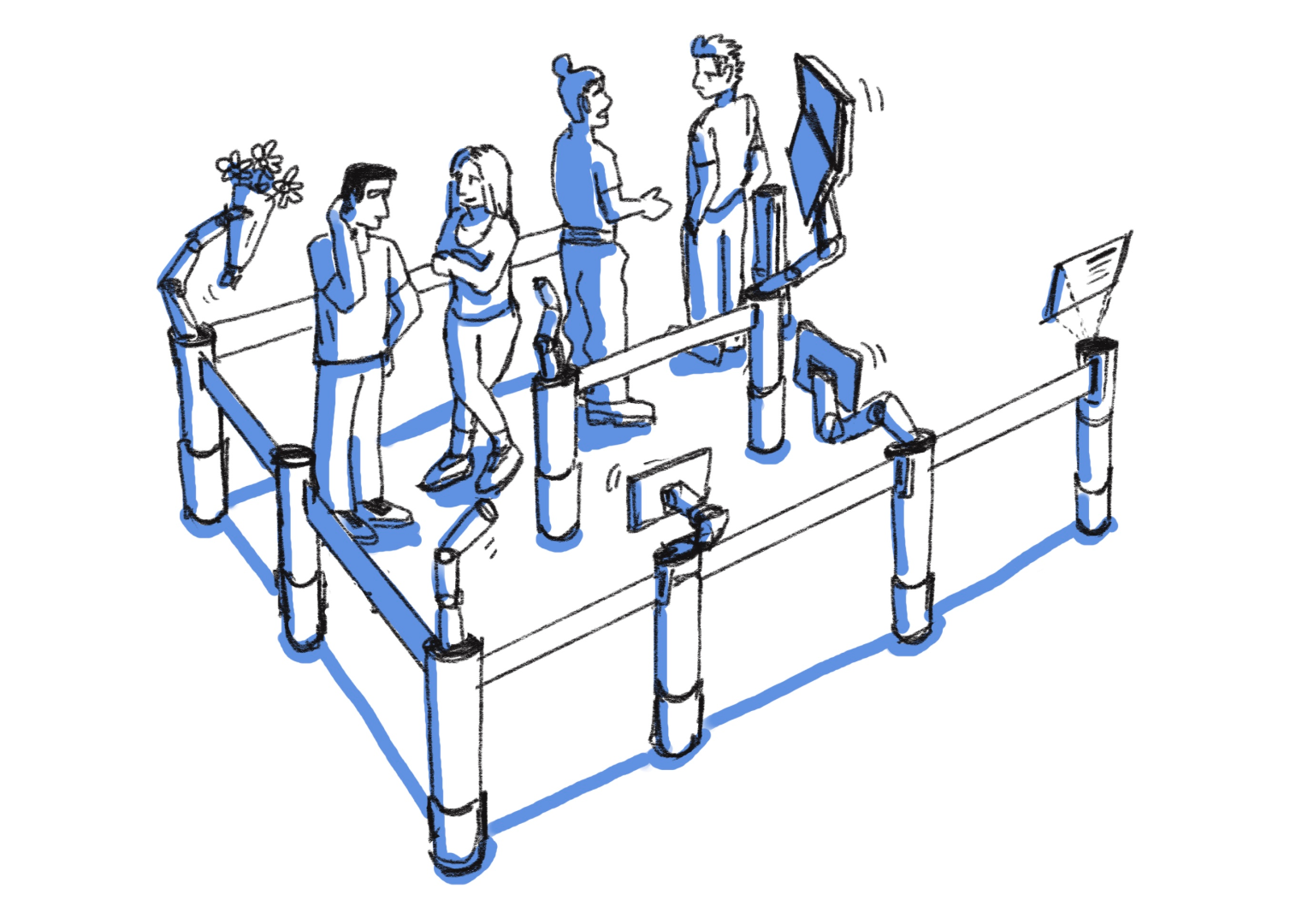
We set up a between-group experiment that recruited people in the field to test the effectiveness of the “Social Queue” for enhancing public waiting-in-line experience. There were two conditions, an experimental group and a control group, and the independent variable was whether the robots were placed in the waiting line. This experiment took place after getting IRB approval from the Georgia Institute of Technology (Protocol H24481).
Activities & User Interaction Types